(Май 2011)
Отыскать посреди океана на глубине около 4 км «черный ящик» давно и загадочно погибшего самолета – это, несомненно, подвиг исследователей. А кроме того, еще и чрезвычайно непростая техническая задача.

Во Францию доставлены для исследований поднятые со дна океана бортовые самописцы авиалайнера Air France 447, два года тому назад (в 2009) потерпевшего катастрофу при весьма загадочных обстоятельствах.

Трагически оборвавшийся полет Аэробуса A330-203 был регулярным авиарейсом компании Air France из Рио-де-Жанейро в Париж, проходившим в ночь с 31 мая на 1 июня 2009 года.
Когда самолет летел над Атлантическим океаном, уже покинув зону радарного слежения Бразилии, но еще не войдя в сенегальское воздушное пространство у берегов Западной Африки, радиосвязь с бортом была потеряна. Никаких сигналов бедствия от экипажа не поступало, а последним радиосообщением с самолета была серия автоматических передач бортового компьютера, извещавших о цепочке отказов в работе оборудования.
Через несколько дней спасательно-поисковых работ в океане, на расстоянии свыше 1000 километров от бразильского побережья, на поверхности воды удалось обнаружить несколько десятков тел погибших и некоторые предметы, однозначно указывавшие на место гибели AF447. Но поскольку в ходе поисков ни «черных ящиков», ни существенных фрагментов самолета на дне океана обнаружить очень долго не удавалось, причина катастрофы, унесшей жизни всех людей на борту – 216 пассажиров и 12 человек экипажа – по сию пору остается неустановленной.

Предпринятая нынешней весной поисковая операция в общей сложности была уже четвертой попыткой отыскать останки рейса AF447 и, вполне возможна, стала бы последней, даже если бы самолет так и не удалось найти. Предыдущие поиски предпринимались с помощью множества разных судов, мини-субмарин и даже атомной подводной лодки ВМС Франции Émeraude и ее чувствительных сонаров – когда еще был шанс отловить акустический сигнал маячков-пингеров от бортовых самописцев самолета.
На третьем заходе поисков, в 2010 году, к операциям по прочесыванию дна были привлечены специалисты WHOI, американского Института океанографических исследований Вудс Хоул (Woods Hole Oceanographic Institute), имевшие подходящее оборудование и большой опыт работы в поисковых исследованиях с помощью автономных роботов-субмарин. Однако, как и все прежние, те попытки закончились неудачей.
На этот раз, чтобы попробовать снова, команда института Woods Hole отправилась из Бразилии 22 марта 2011. Намеченная для сканирования территория была весьма и весьма обширной, но случилось так, что работать исследователям на месте поисков довелось лишь чуть меньше недели. Третьего апреля, на глубине порядка 4,3 километра, им удалось-таки обнаружить останки пропавшего самолета – посреди ровной долины в подводной горном массиве.
Учитывая огромное количество усилий, затраченных всеми прежними поисковыми командами на отыскание AF447, естественно задаться вопросами о том, чем же именно нынешние поиски отличались от всех предыдущих? Что такого особенного смогла сделать команда WHOI, чего не могли сделать все прочие поисковые группы? Или же это просто удача?

Ответы на все эти вопросы можно получить непосредственно от руководителя экспедиции Майка Перселла (Mike Purcell), в Woods Hole занимающего должность главного инженера, которого с пристрастием расспросила американская журналистка Мэгги Кёрт-Бейкер (Maggie Koerth-Baker). В свободном пересказе «отчет» Перселла об этой их поисковой операции выглядит примерно так.
Хотя в целом история института WHOI насчитывает вот уже восьмой десяток лет, привлечением к глубоководным исследованиям роботов там занимаются последние лет пятнадцать. Для непосредственной разработки подводных автономных дронов в институте имеется специальная лаборатория. Полтора десятка лет исследований – для любой области срок немалый, однако в WHOI никогда не торопились и в реальных поисковых операциях начали принимать участие лишь с 2008 года.
Основной «рабочей лошадкой» исследователей сейчас является автономная субмарина Remus 6000, по виду напоминающая желтую торпеду диаметром около 70 см и длиной чуть менее 4 метров. Официальное название этого робота-субмарины Remus 6000 AUV (от Autonomous Underwater Vehicle – «автономный подводный аппарат»), а создан он компанией Hydroid в сотрудничестве со специалистами WHOI и ONR, Управления военно-морских исследований США.

Первый аппарат такого рода появился в 2001 году. Одно из важнейших достоинств этого подводного дрона – возможность работы на больших глубинах до 6 тысяч метров. По свидетельству Перселла, эта особенность делает аппарат уникальным, так что на шесть Ремусов 6000, которые на сегодняшний день имеются в мире, сейчас, вероятно, приходится больше миссий, чем на любую другую модель глубоководных автономных роботов-субмарин.
В распоряжении WHOI имеется несколько Ремусов 6000, причем сами сотрудники института являются и их операторами. Несколько лет назад эта техника участвовала в поисках самолета легендарной женщины-пилота Амелии Эрхарт. В 2010 исследователи WHOI занимались картографированием места гибели Титаника, а затем – теперь уже дважды – Ремусам 6000 довелось участвовать в поисках AF447.
Чтобы выполнять задачу поиска, Remus 6000 заранее получает «программу миссии», т. е., попросту говоря, маршрут движения. Робот отправляется под воду и использует различные навигационные технологии, чтобы плыть по заданному маршруту. Аппарат полностью автономен в своей работе и нет никого, кто мог бы активно управлять его действиями.
Но при этом дрон далеко не так умен, как многие предполагают для автономных роботов. Он не способен, к примеру, принимать решения на основе особенностей ландшафта – кроме как оставаться на некоторой заранее заданной высоте над уровнем дна. Он не может самостоятельно обходить или избегать препятствия, возникающие перед ним по ходу движения.
Имея карту рельефа дна, такие аппараты проходят над горными вершинами и хребтами, однако порой Ремусы 6000 вполне способны и во что-нибудь утыкаться. Короче говоря, у этих машин нет полноценного набора сенсоров и независимой программы ориентации, которые ныне могут иметься у некоторых полностью автономных роботов. Одна из причин в данном случае заключается в том, что в воде такие вещи реализовать существенно сложнее, чем в воздухе. По сути дела, под водой разработчики дрона ограничены лишь одним видом сенсоров – акустическими датчиками.
Конкретно в условиях Срединно-Атлантического хребта, где проводились исследования по поиску AF447, сложный рельеф местности иногда называют чем-то вроде подводных Гималаев. По этой причине многие предполагали, что в условиях такой местности вообще ничего существенно найти не удастся.
Поскольку для аккуратного сканирования требуется выдерживать постоянную дистанцию до дна, для роботов-субмарин требуется движение в соответствии с рельефом – то есть вверх и вниз по этим горам. В наиболее глубоких местах этого региона дно находится на глубине свыше 4 километров (примерно там в итоге и был обнаружен самолет). Однако всего в нескольких километрах от этого места глубина изменяется всего до 2 километров, а горы имеют довольно крутые склоны.
В принципе, говорит Перселл, у них имелась довольно неплохая контурная карта морского дна, однако в реальности, когда в конкретном месте опускаешь подводный аппарат, всегда узнаешь какие-то новые вещи. Так что время от времени дрон непременно утыкается в какую-нибудь неотмеченную на карте гору или скалу. В некоторых случаях, когда такое случается, приходится останавливать миссию. Для этого необходимо сбросить балласт с борта аппарата, и тогда дрон всплывает обратно на поверхность.
В другие разы столкновение приводит к проблемам , которые проявляются лишь парой погружений позднее – вроде того, что у робота неожиданно начинаются проблемы с электричеством. Иногда склон горы уходит вниз так круто, что субмарина просто физически не может двигаться вдоль дна под тем же углом, поэтому хороших данных сканирования не получается, так что приходится возвращаться и делать это еще раз, но уже поднимаясь по склону вверх.
По сравнению со всеми прежними задачами Ремусов 6000, самой большой трудностью нынешних поисков стала небывало большая территория обследования. Обычно, с помощью двух аппаратов за день удается отсканировать порядка 100 квадратных километров дна. Однако реальные цифры зависят от топографии местности. Если дно плоское, то можно сделать больше – при действительно плоской поверхности дна удавалось, бывало, сканировать и по 180 квадратных километров…
При поисках AF447 вся область, намеченная для исследований, занимала общую площадь порядка 17 тысяч квадратных километров. Причем поначалу было совершенно неясно, откуда следует начинать поиски.
После неудач в 2010 году, на этот год была намечена территория площадью 7 тысяч квадратных километров. Однако общий план продолжал подразумевать прочесывание всей площади в целом. В этом году основным отличием стало то, что исследователи решили не опираться на малодостоверные сведения о местных океанских течениях, а просто начали поиск от того места, где последний раз была отмечена позиция самолета.
Помимо явно удачной идеи об исходной точке для начала новых поисков, большую роль в быстром успехе сыграла и правильная организация работ. На этот раз у поисковой команды имелось три аппарата Remus 6000 и 12 человек для их сопровождения, работающих по 12-часовым сменам.
То есть, в каждой смене было занято по 6 человек, занимающихся такими вещами как, как извлечение аппаратов из воды и запуск их обратно в океан, перепрограммирование роботов, постоянное отслеживание их местоположения. При такой постановке дела, как правило, в воде всегда находилось два аппарата AUV. А также всегда был человек, занимавшийся обработкой данных от роботов.
В условиях Ремусов 6000 никакой речи о живой видеотрансляции океанского дна речи не идет. По большому счету, весь поиск происходит практически вслепую. Пока субмарина под водой, нет никакой передачи данных от робота на запустивший его корабль. Все, что получает в это время поисковая команда – это лишь краткие статусные сообщения. То есть акустические послания, периодически поступающие от робота и сообщающие его текущую глубину, плюс долготу и широту географических координат – просто отчеты о состоянии движения, на основе которых можно видеть, все ли идет нормально или же возникли какие-то проблемы.
Когда подводный робот возвращается с задания, уходит около 45 минут на то, чтобы скачать данные из его памяти, и затем еще полчаса, чтобы их обработать и просмотреть на мониторе. В течение этого времени другая команда меняет аккумуляторные батареи и готовит аппарат для возврата на глубину. При идеальных раскладах робот извлекается из воды на три часа, в то время как кто-то просматривает данные, чтобы решить, куда двигаться дальше от этого места, и есть ли на дне вещи, которые следовало бы просканировать еще раз. Когда в работе находятся сразу три аппарата, то дампы данных поступают три раза в сутки.
То, что исследователи получают от робота для анализа, говорит Перселл, это изображения, выстраиваемые по данным акустического сканирования дна. Аппаратура дрона посылает акустический пинг-сигнал каждую секунду, и тот уходит на 700 метров в каждую сторону от субмарины. Возвращенные сигналы накапливаются и превращаются в изображение. Такое сканирование аппарат осуществляет в автономном плавании примерно на протяжении 20 часов.
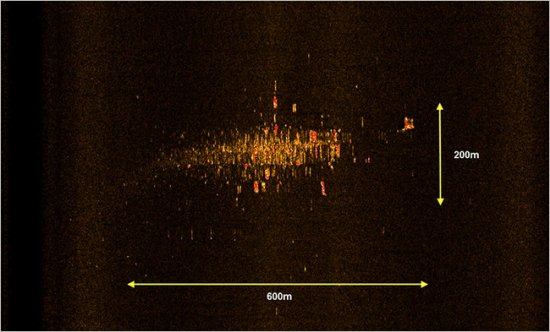
Понятно, что при такой технологии сканирования акустическая картина обломков самолета – это совершенно не то, что люди видят на экране при видеосъемке. В данном случае речь идет, скорее, об абстрактной картине неких аномальных особенностей ландшафта – в том месте, где их, вообще говоря, быть не должно.
Иначе можно сказать, что искомая вещь обычно выглядит как отчетливое скопление ярких точек в той области, где ничего особенного отражаться не должно. По сути дела, как поясняет Перселл, исследователей интересует множество маленьких ярких точек на достаточно большой площади морского дна – конкретно в их условиях на 24-дюймовом мониторе отображается полоса дна шириной 1400 метров.
Хороших алгоритмов для автоматизации этих работ у исследователей пока нет, поэтому требуется достаточно большое количество времени, чтобы стать хорошим специалистом в распознавании данных. Особенно опыт необходим в тех ситуациях, когда анализируются сложные поверхности с переменным ландшафтом.
Как говорят специалисты, понемногу к человеку приходит ощущение того, что выглядит на экране естественно, а что неестественно. Металлические предметы, к примеру, имеют тенденцию обладать резкими или прямоугольными краями. Эта особенность отсылает обратно более сильный сигнал, чем, скажем, сглаженные и закругленные скалы, находящиеся на дне на протяжении миллионов лет.
Конкретно в случае с AF447, впрочем, самолет нашелся лежащим посреди очень плоской области без каких-либо естественных особенностей рельефа, которые могли бы затруднить обнаружение.
По мнению Перселла, другие команды тоже смогли бы найти останки самолета там, где они в итоге обнаружились, будь то с помощью других подводных аппаратов или даже простых, буксируемых кораблями систем сканирования.
Однако, если взглянуть на более широкую картину, на всю ту огромную область дна, которую требовалось просканировать, то дроны Ремус 6000, по его мнению, были самым лучшим инструментом для работы в такого рода ландшафтах. Важен и тот факт, что было задействовано сразу три таких аппарата, непрерывно работавших круглыми сутками.
Плюс, конечно, человеческий фактор – люди, непосредственно и грамотно руководившие поисками с подводных роботов. Все это не только существенно повысило производительность поисков, но и обусловило итоговый успех операции.
Причем итоги этой работы видятся важными не только для расследования обстоятельств гибели AF447. Вместе с окончанием поисков самолета можно констатировать, что учеными-океанографами собран гигантский объем новых данных об исследованном регионе. Причем часть этих данных уже сделана доступными для мирового научного сообщества, а остальная часть станет доступна в недалеком будущем.
Комментируя эти – побочные, так сказать – результаты их поисков, Перселл подчеркивает, что не является геологом и потому не может компетентно разъяснить, что будут делать с этими данными специалисты. Однако, напомнил он, гигантские площади океанского дна по сию пору практически полностью остаются необследованными (поверхность Луны известна человеку куда лучше, чем поверхность дна океанов на Земле).
В ходе нынешних поисков проведено подробное картографирование площади дна порядка 1500 квадратных миль, т. е. примерно 5 тысяч квадратных километров Срединно-Атлантического хребта. И можно предполагать, что там обнаруживается много существенных подробностей о сложной географии этого региона.
Постскриптум из 2014:
О расследовании причин катастрофы авиарейса AF447 ныне имеется подробный рассказ в Википедии.

Для отправки комментария необходимо войти на сайт.