(Июнь 2002)

Понятие “роботы” в буквальном смысле с момента своего появления в человеческой культуре непременно вызывает у нас двойственную реакцию.
С одной стороны, с этими аппаратами связываются надежды на полное избавление от скучной или вредной для жизни работы, с другой же стороны, в роботах всегда видели опасных противников, потенциально угрожающих самому существованию человечества.
Начало этой традиции заложил еще отец термина “робот”, чешский писатель-философ Карел Чапек, породивший новое слово от славянского “robota”. В пьесе Чапека 1920-го года R.U.R. (“Универсальные роботы Россума”) описано общество, попавшее в зависимость от им же созданных человекоподобных машин-работников, которые превзошли в мастерстве людей, а потому и перестали в них нуждаться.
Впоследствии тему роботов обыгрывал в своих произведениях практически всякий уважающий себя фантаст. Сами же машины-автоматы тем временем медленно, но верно все глубже проникают в нашу реальную жизнь, с каждым годом становясь все совершеннее.
Приход роботов оказывается столь же естественен, как и весь научно-технический прогресс. Без автоматических устройств ныне уже не мыслятся ни производство, ни быт, ни медицина, ни космические полеты. С роботов для освоения далеких миров, пожалуй, и имеет смысл начать этот небольшой обзор.
Космонавты
В американском космическом научно-исследовательском центре JPL и в Институте передовых концепций НАСА сейчас одновременно разрабатывается внушительный ряд весьма различных по конструкции роботов-разведчиков. Что можно считать вполне естественным, поскольку условия на разных планетах могут отличаться самым радикальным образом.
Например, одна из наиболее экзотических конструкций, так называемый робот Cryobot, предназначается для прохождения и исследования многокилометровой толщи льда на спутнике Юпитера Европе или на полярных шапках Марса.
Разогревая собственный корпус, этот “криобот” расплавляет для себя проход во льду, а внутри может нести еще одного автономного робота поменьше — так называемый Hydrobot — для изучения теплого подледного океана Европы.
Инженерам НАСА уже удалось провести несколько успешных испытаний прототипа аппарата в Антарктиде и Арктике, однако из-за последних бюджетных сокращений подготовка экспедиции к Европе, а вместе с ней и проект Cryobot оказались заморожены на неопределенное время.
Более широко применимыми, а значит и более перспективными для финансирования в области “инопланетной” робототехники считаются биоморфные конструкции. Иначе говоря, недорогие и сравнительно несложные аппараты, копирующие какие-либо характерные особенности представителей мира биологии.
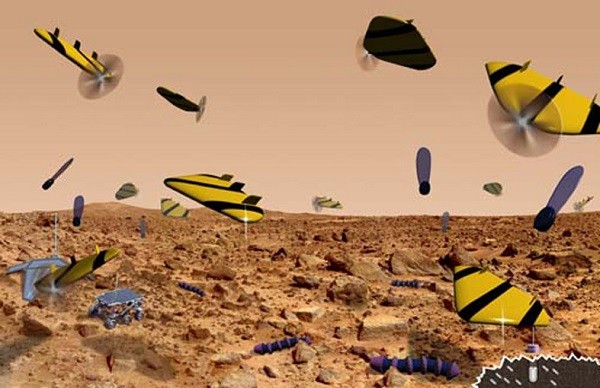
Достаточно типичный пример — это целая флотилия миниатюрных летающих сенсоров-разведчиков, перемещающихся на основе тех же принципов, что и семена клена с характерными лопастями-крылышками. Распыление таких роботов-семян позволяет оперативно собрать данные об особенностях среды над достаточно значительной площадью поверхности незнакомой планеты.
Для исследования среды под поверхностью разрабатываются небольшие роботы-черви. Каждый из подобных аппаратов — будь то в воздухе, на суше или под землей — имеет достаточно несложное устройство, однако в совокупности, как мыслится, роботы будут образовывать нечто вроде пчелиной или муравьиной колонии, совместно решая достаточно сложные задачи.
Биоморфные системы, особенно летающие, представляются чрезвычайно привлекательной концепцией исследования планетных тел солнечной системы. Главным образом, благодараря широчайшему спектру областей их применения и способностям проникать в самые труднодоступные места.
Одновременно в космических лабораториях разрабатываются и более привычного вида роботы-разведчики в традиционном стиле “луноход” — повышенной проходимости трактор с системой стереоскопического зрения и кучей всевозможных сенсоров на борту.

Одна из наиболее удачных моделей такого рода, созданных за последние годы в JPL, носит название “тактический мобильный робот Urbie”. Аппарат самостоятельно пробирается в местности со сложным рельефом, оценивая препятствия с помощью стереозрения, а гибкая ходовая часть позволяет взбираться даже по лестницам.
Где-нибудь на Марсе последнее качество, быть может, и без нужды, но вот в городских условиях оказывается крайне полезным. Дело в том, что робот Urbie — это плод совместного творчества НАСА, военного агентства передовых исследований DARPA и ряда работающих по их заказу американских университетов.
Главное же предназначение машины состоит не столько в путешествиях к дальним мирам, сколько в разведке на местности с повышенной радиацией, в условиях применения биологического или химического оружия, а также в любых других обстоятельствах, представляющих повышенную опасность для жизни людей.
Солдаты
В настоящее время агентство DARPA финансирует разработку военных роботов более чем в четырех десятках компаний и университетских лабораторий.
Со свойственной милитаризму скрытностью вокруг этих работ обычно воздвигаются заслоны секретности, поскольку некоторые из машин способны нести в себе новые виды оружия, как смертельного, так и нелетального поражения.
Но основные усилия сконцентрированы на создании небольших и подвижных роботов-разведчиков, забрасываемых на вражескую территорию. Разрабатываются также человекоподобные прямоходящие роботы, которых в городских, скажем, условиях мыслится выпускать первыми на “слепые”, плохо просматриваемые перекрестки, чтобы машина вызывала на себя огонь замаскировавшихся снайперов противника.
Весьма любопытные устройства создаются для целей тактической разведки. Например, в лаборатории Draper (Кембридж, шт. Массачусетс) с 2000 года ведется разработка серии “забрасываемых” роботов — небольшого, размером примерно с гранату, и достаточно легкого устройства, которое боец может рукой закинуть в окно подозрительного дома или в вентиляционный люк бункера.

Достигнув цели, робот разведчик разворачивается и начинает транслировать хозяину видео и аудиоинформацию о происходящем внутри здания. По сути дела, солдаты получают возможности рентгеновского просвечивания и “сверхчеловеческого” прослушивания сооружений.
Первым реальным результатом исследовательской программы лаборатории Draper стал робот Spike, в сложенном для забрасывания состоянии имеющий размер с грейпфрут, а в рабочем разворачивающий своеобразные колеса в виде изогнутых острых спиц. Аппарат Spike не имеет собственной системы ориентации и управляется дистанционно солдатом с помощью джойстика и беспроводной связи.
Однако на подходе уже следующая, более продвинутая модель высокомобильного микроробота HMTM (от high-mobility tactical microrobot). На его основе разработчики намерены в течение ближайших трех лет создать готовую для боевых условий модель стоимостью около 5 тысяч долларов.
Но сначала требуется решить массу проблем с уверенным передвижением робота в таких непростых условиях как грязь, вода и гравий. Кроме того, машина должна безболезненно переносить падения на асфальт или каменное покрытие с высоты в несколько метров, для чего требуется применение материалов повышенной прочности.
Археологи
Совершенно неоценимую помощь роботы способны оказывать историкам и археологам, изучающим сооружения древних цивилизаций.
Специализированные исследовательские аппараты позволяют проникать в такие места, куда иначе и попасть-то невозможно, не разрушив постройку.
Ярчайший тому пример — проведенное в начале 1990-х годов исследование так называемых “вентиляционных шахт” в пирамиде Хеопса.
Единственное из сохранившихся до наших дней “семи чудес света”, это сооружение по сию пору таит в себе удивительные и абсолютно никак не разрешенные загадки.
Никто не знает, почему в этой пирамиде не одна, как в остальных, а целых три погребальных камеры на разных уровнях. Причем две верхние из них имеют по паре длинных, диагонально идущих вверх шахт, назначение которых ученым совершенно непонятно, поскольку в погребальных обычаях древних египтян прослеживается совершенно иная традиция — как можно герметичнее изолировать место захоронения фараона.
Еще большее недоумение эти шахты вызывают у инженеров, так как диагональные структуры вносят в гигантскую многослойную конструкцию пирамиды совершенно чудовищные технические проблемы из-за крайне опасного перераспределения нагрузки, а значит строители древности должны были иметь какие-то чрезвычайно важные причины для добавления столь сложного элемента. Наконец, если две шахты из верхней камеры выходят наружу, то выходы каналов из камеры, расположенной ниже, на поверхности пирамиды обнаружить не удалось.
Все эти загадки сподвигли германского инженера Рудольфа Гантенбринка на сооружение нескольких специальных роботов, получивших символическое название Upuaut по имени древнеегипетского бога Упуата, “открывателя путей” в загробный мир.
При поддержке германских и египетских ученых Гантенбринку и его роботам удалось в 1992-1993 гг. не только подробно исследовать и расчистить шахты верхней камеры, но и впервые в истории проникнуть вглубь шахт камеры нижней. Причем там робот Upuaut-2 сделал удивительное открытие.
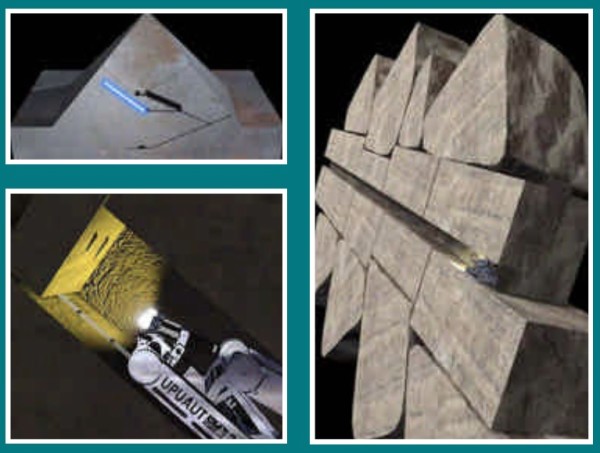
Пройдя свыше 50 метров вверх по наклонной шахте, имеющей сечение 20×20 сантиметров, робот уперся в поперечную плиту из высококачественного облицовочного песчаника, снабженную к тому же двумя медными деталями фурнитуры, более всего похожими на крепления ручки с обратной стороны плиты. Иными словами аппарат уперся в нечто, похожее на дверцу, и даже обнаружил щель, позволяющую в принципе заглянуть и далее…
Но тут, к сожалению, вокруг важного открытия начались какие-то малопристойные околонаучные интриги, в результате которых Гантенбринка и его роботов отстранили от исследований пирамиды. Так что археология в буквальном смысле застряла на пороге интереснейшего открытия, и за прошедшие с той поры годы ситуация с исследованием шахт не продвинулась ни на йоту.
Немецкий инженер не теряет надежды вернуться к исследованиям и разработал целый пакет технических предложений по недорогому и эффективному изучению того, что таится за перегородкой, однако египетские власти предпочитают игнорировать Гантенбринка. С подробностями всей этой истории можно познакомиться на сайте www.cheops.org.
PolyBot многоликий
Среди разрабатываемых в настоящее время новых конструкций одной из наиболее любопытных и многообещающих считается концепция многомодульных (или иначе полиморфных) роботов.
Важнейшим достоинством всякого многофункционального робота, работающего за пределами заводских сборочных линий, принято полагать гибкость и адаптируемость к изменяющимся условиям внешней среды.
Поэтому около десяти лет назад сразу в нескольких лабораториях мира родилась идея создания реконфигурируемого робота, состоящего из множества однотипных модулей, которые в зависимости от задачи объединялись бы в разнообразные формы наподобие детского конструктора Lego.
Работы в этом направлении ведутся сейчас в целом ряде университетов и компаний США, Европы и Японии. Наиболее впечатляющих, возможно, результатов добились ученые-разработчики PARC, Исследовательского центра Xerox в Пало-Альто. Во всяком случае, именно о созданном здесь семействе роботов PolyBot больше всего написано в прессе. Поэтому на примере “полиботов” удобнее всего познакомиться с общей концепцией многомодульных реконфигурируемых роботов.

Представьте себе аппарат, состоящий из цепочки простых, шарнирно соединенных “кубиков”, каждый из которых имеет встроенный процессор и электропривод.
Оказавшись на ровной поверхности, этот робот складывает себя в форме колеса, что позволяет ему перемещаться с наибольшей скоростью. Если вокруг много камней и расщелин, робот перестраивается в многоногого “паука”, а если натыкается на непреодолимый завал, то вытягивается в длинную и юркую “змею”.
Такая концепция представляется чрезвычайно многообещающей, к примеру, при спасательных работах в развалинах зданий. Особенно если учесть, что найдя под завалом человека этот же робот, в теории, может тут же автоматически перестроиться в страховочный кокон-каркас, обеспечивающий дополнительную защиту пострадавшему.
Сейчас полиморфные роботы-прототипы состоят из десятков, максимум сотен модулей. Одна из важнейших проблем — гигантская сложность программирования машины, поскольку добавление модулей приводит к экспоненциальному росту различных вариантов конфигурации.
В потенциале же, когда размер модулей удастся существенно уменьшить, а программы управления оптимизировать, количество элементов сможет достигать миллионов, напоминая клетки человеческого организма, общее число которых огромно, а количество разных типов сравнительно невелико. Такие роботы уже получили собственное название — N-модульные системы, где N обозначает количество разных типов модулей.
Три главных плюса, которые обещают N-модульные системы — это гибкость, надежность и низкая стоимость. Гибкость является наиболее очевидным следствием разнообразия форм объединения модулей — уже несколько тысяч кирпичиков могут стать и небольшим подъемным краном, и средством передвижения, и мебелью, и сотней других полезных устройств.
Надежность системы обеспечивается избыточностью и небольшим количеством разных типов модулей. Это значит, что всякий вышедший из строя модуль может быть либо сравнительно безболезненно “выключен”, либо заменен на работоспособный.
Таким образом полиморфный робот является и ярчайшим примером модной ныне концепции “элегантной деградации”, когда система не ломается при любом локальном повреждении и имеет способности к самоисцелению.
Наконец, прогноз низкой стоимость многомодульных систем базируется на заложенной в концепцию идее массового (а значит недорогого) производства элементов-модулей.
Для всех, кто мало-мальски знаком с фантастической кинопродукцией Голливуда, нынешние прожекты, связанные с полиморфными N-модульными системами, просто не могут не вызывать в памяти ассоциации с “жидкометаллическим” роботом-киллером из фильма “Терминатор-2”. Нагляднейшая, можно сказать, демонстрация концепции, доведенной до совершенства в деле уничтожения рода человеческого.
Но какие бы потенциальные угрозы ни исходили от роботов — всегда дело вовсе не в них, а исключительно в самом человеке.
Ведь абсолютно на одном и том же принципе построены и автоматическая подача бутербродов в окошке уличного киоска, и подача разрывных пуль в магазин крупнокалиберного пулемета. Тут все зависит от нас.
The END
Дополнительное чтение
2011: Джедай во тьме египетской (новые приключения роботов в пирамиде Хеопса), https://kiwibyrd.org/2013/04/17/2011-06/
2009: Роботы на войне (уже давно количество роботов, применяемых в военных действиях, исчисляется тысячами), https://kiwibyrd.org/2013/07/16/904/
2011: Беззаконие роботехники (острейший дефицит законов и этики в новом-опасном деле), https://kiwibyrd.org/2014/12/29/1119/
2012: Сгореть и вернуться (военные, разведка и полиморфные роботы в космосе), https://kiwibyrd.org/2014/03/11/1292/
2014: Без права на ошибку (расцвет роботехники и корпорация Google), https://kiwibyrd.org/2015/02/07/142/

Для отправки комментария необходимо войти на сайт.